PC机自从诞生以来,就一直试图进入工业控制领域。但直到九十年代末,才开始形成一股潮流。所谓的PC-BASED控制技术,有狭义和广义之分,狭义的就是直接用PC机的全部或大部分相关技术在工业控制系统中使用,这些技术包括:INTEL COMPATIBLE CPU,MS SOFTWARE,ISA 或PCI总线,以太网技术,狭义的PC-BASED控制技术的代表是工业计算机(IPC)。而广义的PC-BASED的控制技术就是采用了一部分的PC机所采用的技术,这类系统由于太过广泛...
制造业, 自动化, 讲座阅读全文
八十年代种类繁多的DCS、PLC以及其它各类控制系统的出现,使自动化的可靠性和实时性、可操作性和可维护性都得到极大的改善,成为控制系统的主流产品。但由于各个厂家的产品都属于专用的系统,有各自的总线和通信标准及系列产品,编程软件和运行支持软件开放性较差,致使用户长期非情愿地依赖某一厂家的产品,这严重损害了用户利益,也与自动化系统的功能集成化、风险分散化、通讯开放化的发展方向格格不入。为此,各界人士进行...
制造业, 自动化, 讲座阅读全文
AGV,又叫自动导引车,从早期的有轨导引车发展热来,最早出现与20世纪70年代。目前,在企业的物流系统和离散制造的装配系统中已经起着非常重要的作用。而且在今后,将成为工厂物流处理的主要设备。
AGV的定义
AGV的定义是:按照规定将物料从一个地点运输到另一个地点的无人驾驶的有计算机控制的运输工具。由于AGV可以通过电脑编程,可以方便地按不同的路线行走,将比通常的物流系统更加灵活,而且AGV的将大大节约在物料处理方面...
制造业, 自动化, 讲座阅读全文
机器人的含义很广,有许多种不同的定义。根据美国机器人协会的定义,“机器人是一种可以再编程的多功能的操作机构,通过预先编程设定的动作用来移动物体、零件、工具或特别器件,以及完成各类不同的任务。”
请注意该定义中的“可再编程”和“多功能”这两个词,它们将机器人同大量的单一目的自动机械区分开来,可再编程意味着两件事:第一,机器人根据所编的程序工作,第二,程序可以重写,因此机器人可以做许多种不同的工作。
机器...
制造业, 自动化, 讲座阅读全文
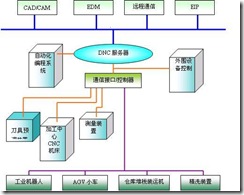
在离散制造业中,有一些在连续流程工业中较少使用的自动化技术。这些技术包括:数字控制技术(NC)和DNC,工业机器人、AGV等。从本篇开始,下面介绍几种常用的技术。这些技术在连续流程工业的设备中也有使用,只不过因为是在设备内部,因此通常不被人注意而已。
数控技术与DNC的进展
离散制造业中一个最基本的概念是数字控制技术(NC)。它指采用预先设计和写好的指令来控制机器、工具或其它制造设备的操作。数控机器必须有一个解...
制造业, 自动化, 讲座阅读全文
SCADA的由来
SCADA系统,对于熟悉这个系统的人来说就是SCADA系统,对于不熟悉的人员来说,很难找英文原意给它一个确切的译名。
SCADA的原文是:Supervisory Control And Data Acquisition. ,直译是数据采集与监控系统。中文与它的意义比较接近的词是遥控遥测系统,过去有“三遥”(遥测、遥信、遥控)和“四遥”(前三遥加上遥调)的说法,这是首先在电力系统采用的叫法;遥测指远程模拟量输入采集,遥信指远程开关量输入采集,遥...
制造业, 自动化, 讲座阅读全文
DCS,英文为Distributed Control System,直译应该是分布式控制系统,我国的习惯叫法是集散控制系统,诞生于1975年。这种叫法是相对于集中式控制系统而言的,在60年代,当计算机刚刚诞生时,有人试图用计算机对整个工厂设备进行控制,这时的控制系统称为集中式控制系统,由于这种系统一旦失败就有可能威胁到整个系统,因此,后来将设计修改为分散型的机构,即一个系统包括多个计算机,每个计算机系统只包含8个或稍多一些的回路控...
制造业, 自动化, 讲座阅读全文
PLC是自动控制技术的核心产品。据PLC的全球市场的领导者AB公司(现被ROCKWELL收购)的定义,“PLC是一种固态控制系统,有一个用户可编程的内存,其中的指令可以用来实现特定的功能,如I/O控制逻辑,延时,计数,算法和数据处理。”
可编程控制器最早是用来代替硬接线的继电器板的,由于这些继电器板体积庞大而且接线复杂,每次控制方案改变都要重新接线,早期的PLC用逻辑关系来代替这些接线。后来,PLC的功能被大大扩充了。过去,...
制造业, 自动化, 讲座阅读全文
控制系统的第一代产生于1930年到1940年,主要代表是以基地式仪表为代表的机械控制技术。第二代产生于1950年,主要是电气控制技术为主的继电器控制技术和调节器为代表的模拟控制技术。目前所称的控制系统是第三代控制系统,诞生于二十世纪七十年代,主要技术代表是用于流程工业的集散控制系统(DCS)和用于离散工业的可编程控制器(PLC)。
现在,自动化控制系统正在向第四代控制系统发展,第四代控制系统有两个趋势,一是系统的...
制造业, 自动化, 讲座阅读全文